| As part of my bachelor's studies | |||||
|
Show all projects
|
Real-time virtual robot world | ||||
| Software engineering project | |||||
| Blender C++ Kinect OGRE Qt SVN Unreal Engine 4 | |||||
|
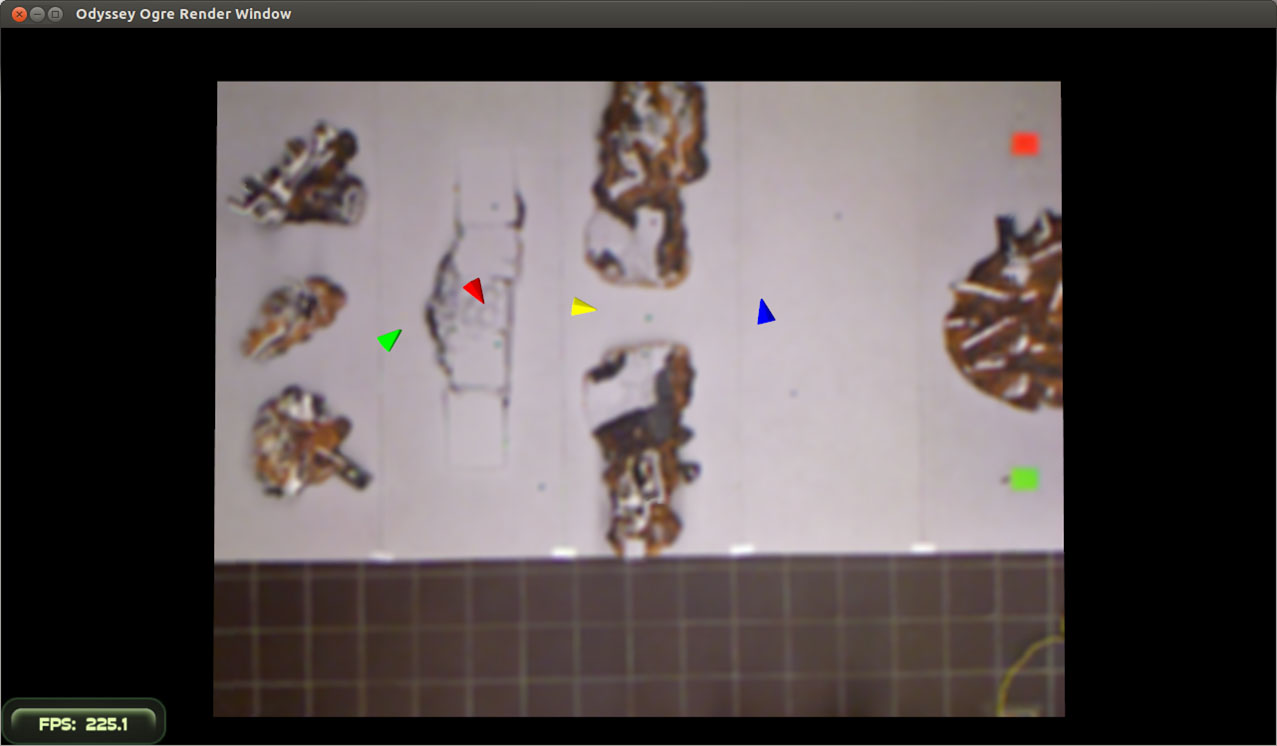
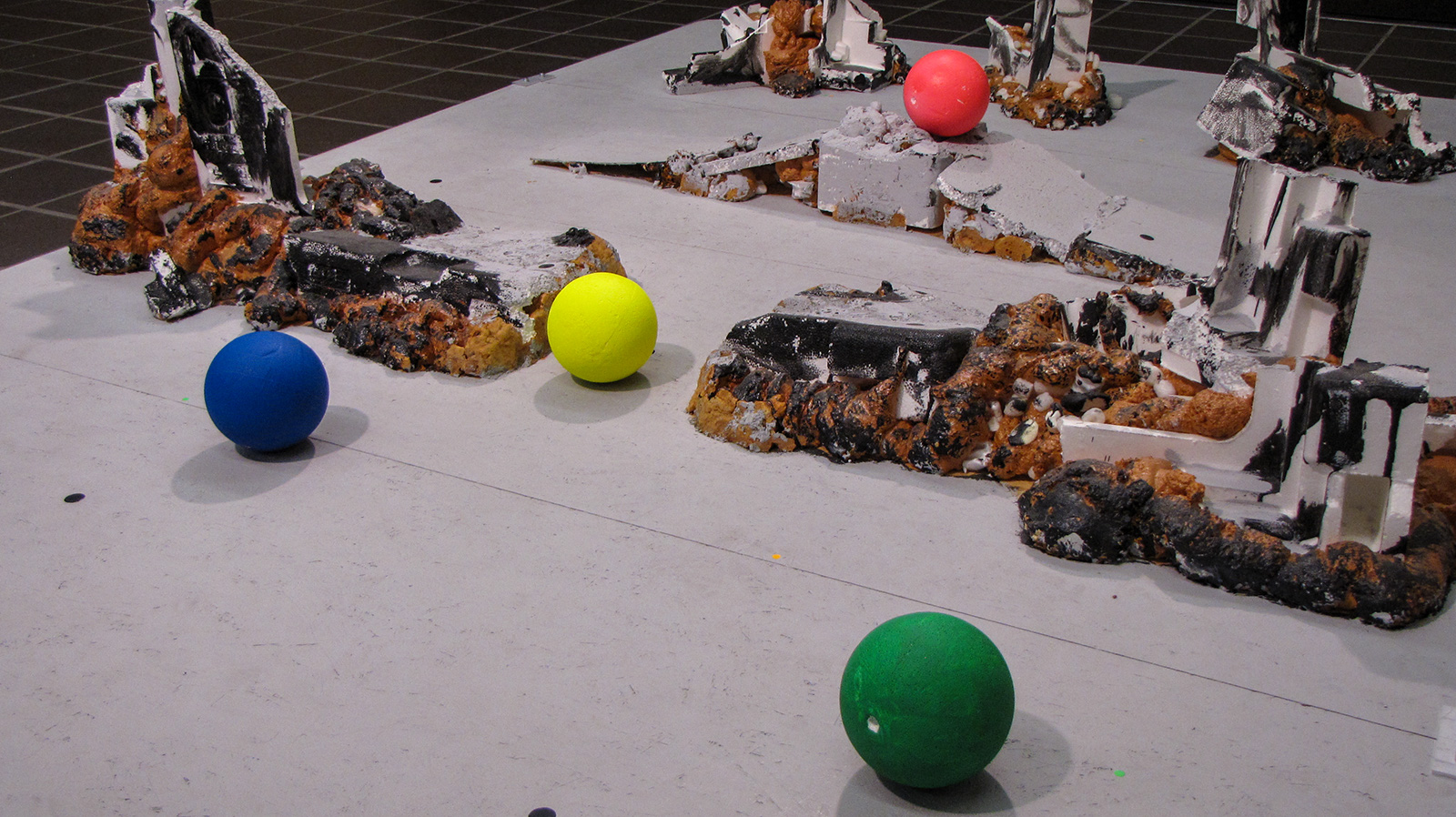
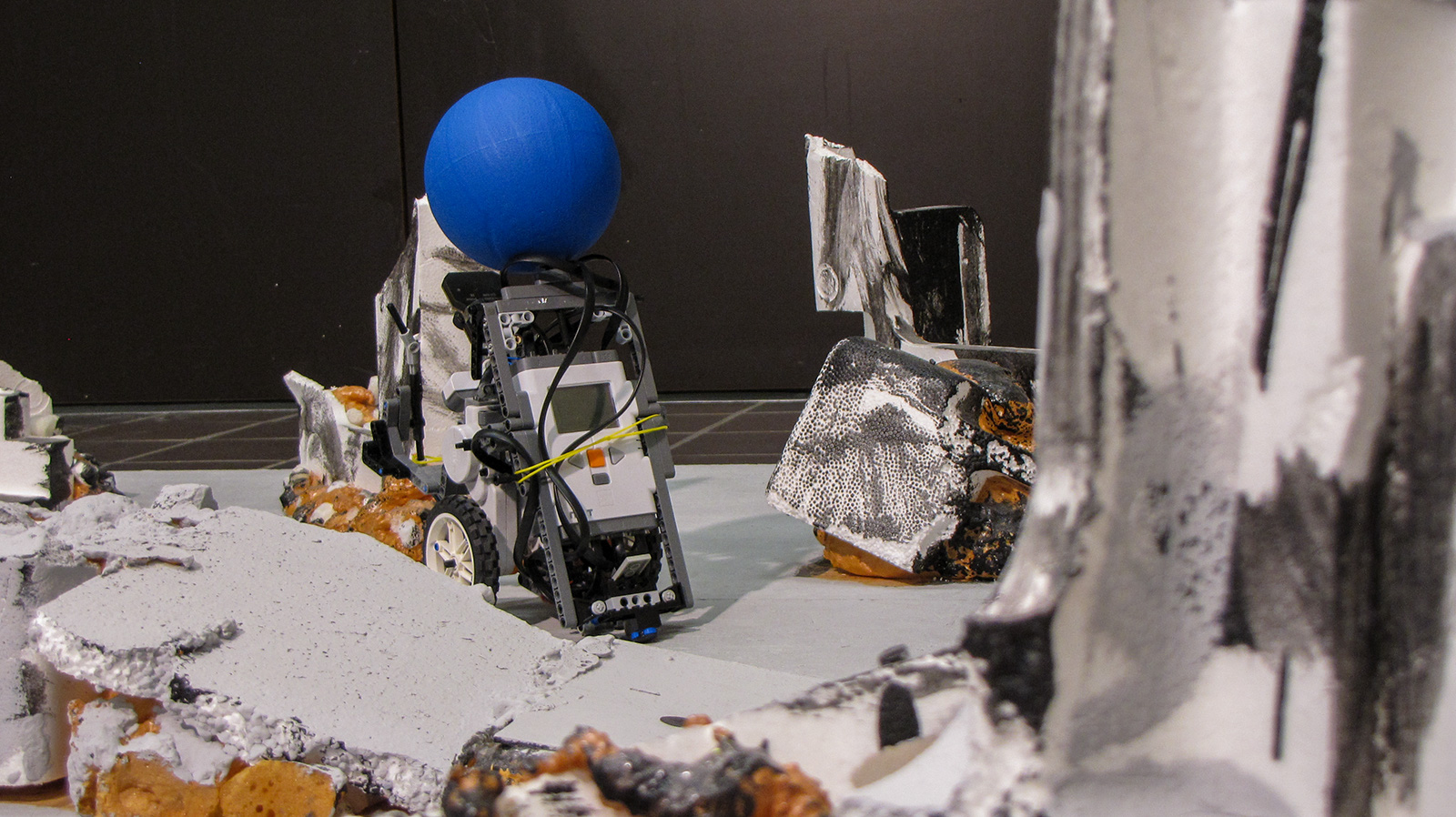
An existing Qt based system visualizes robot movements in a modelled terrain. The visualisation takes place in two-dimensional space. The data needed for this simulation is generated by a Microsoft Kinect camera and contains single position values of the robots and a point cloud of the modelled terrain. To support the hypothesis that game engines can also be used for scientific purposes, this system is to be extended by an interactive game engine. Using this engine, the system is to be supplemented with a third dimension and limits of the perspective and display settings are to be widened. The aim of the thesis is to create and realize a concept for the processing and presentation of the data. Four game engines and different approaches were evaluated for the implementation. Two prototypes using different engines were created and a solution concept using OGRE (Object-Oriented Graphics Rendering Engine) was designed based on the findings from the prototypes. To test the solution, the modelled terrain was set up, spheres made of polystyrene which were used to track the robots were positioned in the terrain and moved during runtime. The solution which was planned and implemented is integrated directly into the existing system and renders the system data in a three-dimensional form in real time. Game characteristic interactions like a freely moveable virtual camera or an optional third-person view of a specific robot are built into the engine as well. The conclusion is that game engines can also be used for scientific purposes. I collaborated with Daniel Gonçalves and the ZHAW Institute of Mechatronic Systems on this project. 2014 |